Fisher ROC Driver
Not counted towards your tag license limit.
The ROC driver cannot share a port with the 12.1 version of the Modbus driver or Enron Modbus driver.
Related Application Properties
ROCReadOnStartup - If true (1), the ROC driver will read all values when the system starts. Defaults to false (0).
ROCDriverSharedRPC - When true (1) indicates that the same RPC. drivernameSharedRPC properties are stored in Settings.Startup, not Settings.Dynamic. Changes require a restart of the application in order to take effect.
ROCMaxPointReadDataSize - Defaults to 239. The maximum number of values requested in a single point read. (opcode 167)
ROCMaxParmReadDataSize - Defaults to 239. The maximum number of values requested in a single parm read. (opcode 180)
ROCIgnoreFatalErrOnParmRead - Defaults to 0. If TRUE (1), allows the driver to attempt to continue after encountering a fatal error.
ROCDriverFailoverCount - Defaults to 1. Number of communication failures before switching to backup.
ROCNewSiteDailyHisSeconds - Defaults to 604800. Sets the default history length for daily point read history in seconds
ROCNewSiteHourlyHisSeconds - Defaults to 172800. Sets the default history length for hourly point read history in seconds
ROCIgnoreFatalErrOnHistRead - Defaults to 0. Allows the driver to attempt to continue after encountering a fatal error reading history
The ID tab of every tag includes the same common elements: Name, Area, Description, and Help ID.
Name:
Uniquely identifies each tag in the application. If the tag is a child of another, the parent names will be displayed in a separate area before the name field.
You may right-click on the tag's name to add or remove a conditional start expression.
Area
The area field is used to group similar tags together. By defining an area, you make it possible to:
- Filter for particular tag groups when searching in the tag browser.
- Link dial-out alarm rosters to Alarm tags having a particular area.
- Limit the number of tags loaded upon startup.
- Filter the alarm display to show only certain areas.
- Filter tag selection by area when building reports.
When working with Parent-Child tag structures, the area property of all child tags will automatically match the configured area of a parent. Naturally, you can change any tag's area as required. In the case of a child tag, the field background will turn yellow to indicate that you have applied an override. (Orange in the case of user-defined types. Refer to Configuration Field Colors).
To use the area field effectively, you might consider setting the same Area for each I/O driver and its related I/O tags to group all the tags representing the equipment processes installed at each I/O device. You might also consider naming the Area property for the physical location of the tag (i.e. a station or name of a landmark near the location of the I/O device). For serial port or Roster tags, you might configure the Area property according to the purpose of each tag, such as System or Communications.
You may define as many areas as you wish and you may leave the area blank for some tags (note that for Modem tags that are to be used with the Alarm Notification System, it is actually required that the area field be left blank).
To define a new area, type the name in the field. It will immediately be added. To use an existing area, use the drop-down list feature. Re-typing an existing area name is not recommended since a typo or misspelling will result in a second area being created.
There is no tool to remove an area name from VTScada since such a tool is unnecessary. An area definition will exist as long as any tag uses it and will stop existing when no tag uses it (following the next re-start).
Description
Tag names tend to be brief. The description field provides a way to give each tag a human-friendly note describing its purpose. While not mandatory, the description is highly recommended.
Tag descriptions are displayed in the tag browser, in the list of tags to be selected for a report and also on-screen when the operator holds the pointer over the tag’s widget. For installations that use the Alarm Notification System, the description will be spoken when identifying the tag that caused the alarm.
The description field will store up to 65,500 characters, but this will exceed the practical limits of what can be displayed on-screen.
This note is relevant only to those with a multilingual user interface:
When editing any textual parameter (description, area, engineering units...) always work in the phrase editor. Any changes made directly to the textual parameter will result in a new phrase being created rather than the existing phrase being changed.
In a unilingual application this makes no difference, but in a multilingual application it is regarded as poor practice.
Help Search Key
Used only by those who have created their own CHM-format context sensitive help files to accompany their application.
Server List
Select (or create) a named server list.
ROC Driver properties Settings tab
The following properties are configured in the Settings tab:
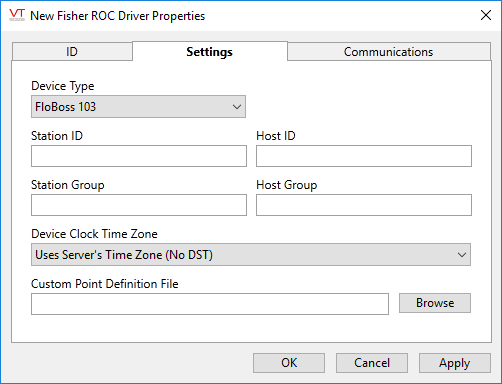
Device Type
From the drop list, select the ROC device type being configured. Options include:
- ROC300 ROCPAC
- FloBoss 407
- ROC300 FlashPAC
- ROC800
- FloBoss 103
- FloBoss 107
- ROC800L
- FloBoss 107 - Alternate ROCNOC
- FloBoss 107 - Surface Control Manager
- FloBoss 103 - Surface Control Manager
Station ID
"Station" refers to the ROC device.
The ID is the identifier used by each ROC device so that it knows which messages it is meant to respond to.
Station Group
The Group is used to further distinguish one device from another, especially in cases where there are more than 255 ROC devices on the network. For example, a message addressed to ID 100 in Group 2 will not be answered by ID 100 of Group 3.
Host ID and Host Group
"Host" refers to the VTScada application.
The VTScada driver is given an ID and a Group so that the response messages from the RTU can be delivered properly.
Device Clock Time Zone
The time zone of the clock in the device. This is used to correct the time-stamped data, read from the device by VTScada, for storage using UTC format. \
Regardless of the time zone selected with this option, the driver assumes that the device does not adjust its clock for daylight savings time (DST). Take care to ensure that this is the case for your system.
- Uses Server Time Zone (no DST) - assumes that the device is in the same time zone as the server.
- Device Clock In UTC - the clock in the device is set to UTC. Strongly recommended.
- Actual Time Zone - select the actual time zone that the device is located in
Custom Point Definition File
If configuring for custom point types, select the .CSV file holding the definition for those types. This file must have the same format as the file C:\VTScada\VTS\ROCPointDefinitions.CSV, which is found in every installation of VTScada. Refer to: ROC Address Storage.
ROC Driver properties Communications tab
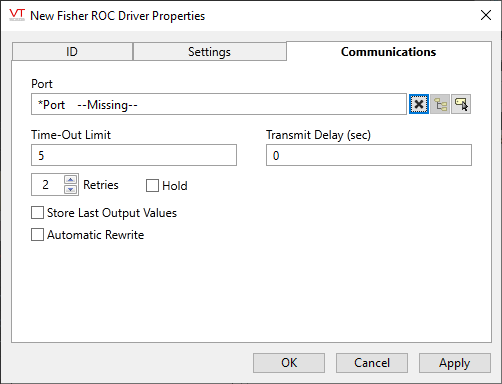
Port
The port tag through which this driver communicates with a device. This is normally a serial port tag or a TCP/IP tag.
Time-Out Limit
The length of time, in seconds, that the driver should wait for a reply from the device.
Transmit Delay (sec)
Will delay the sending of messages. ROC field devices using RF links can hold the carrier on for a short period of time after sending a response message back to the host, resulting in missed messages. Use this to force a delay, giving the field device a chance to close the carrier. The delay defaults to 0 seconds
Retries
The number of times to retry a message before declaring an error.
Use only if the driver is connected to a device that uses a serial port or a UDP/IP port that is configured to be polled. When connected directly to a device using TCP/IP, this value should normally be set to 0 since TCP/IP is a guaranteed message delivery protocol.
For unreliable communications, such as radio, set to 3 or 4.
Hold
Select this to have I/O tags attached to the driver hold their last value in the event of a communication failure. If not selected, tags will have their value set to invalid on a communication failure.
Store Last Output Values
Flag indicating that the last values written to the device should be maintained. If true, the driver will maintain the last values written for each address, allowing these value to either be re-written manually or automatically.
Automatic Rewrites
Flag indicating the driver should automatically rewrite the last value written to each address upon successful establishment of communications after a driver error occurred.
The following widgets are available to display information about your Fisher ROC driver tags:
ROC Driver History Info Button
